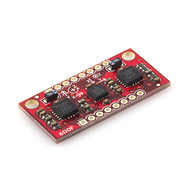
Centrale inertielle :C'est une centrale inertielle analogique. Elle délivre 6 signaux analogiques: 3 signaux d'accélération, et 3 signaux de vitesse de rotation.J'ai choisi cette centrale inertielle, car c'était à l'époque du début du projet la plus compacte possible (pour un prix raisonnable). Elle utilise des capteurs de qualité moyenne. Les accéléromètres notamment sont de mauvaise qualité, et l'erreur d'offset varie rapidement dans le temps, ce qui est gênant. Contrairement à une mode assez répendue, je n'utilise pas de centrale inertielle possédant un microcontroleur. Tous les calculs nécessaires sont réalisés dans l'unique microcontroleur principal. D'ailleurs, pour bien fonctionner, une centrale inertielle doit connaitre certaines informations sur les consignes appliquées aux moteurs et aux servos: est-ce que le drone est probablement posé au sol (puissance moteurs faible), est-ce que l'on a ordonné au drone de se pencher ou non... Tout regrouper dans un seul microcontroleur me semble donc plus logique. |
 |

Hardware:
Software:
Développement:
Gallerie:
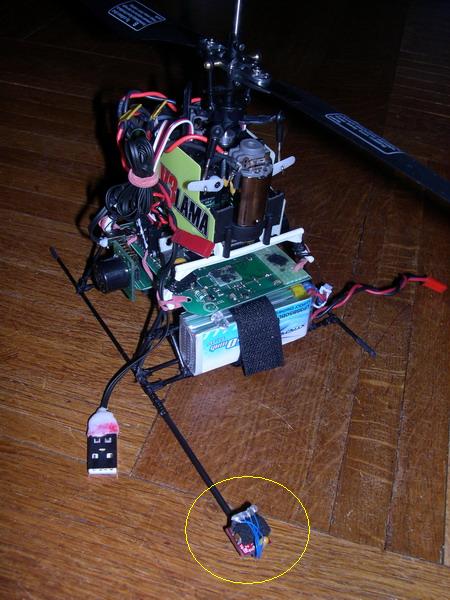
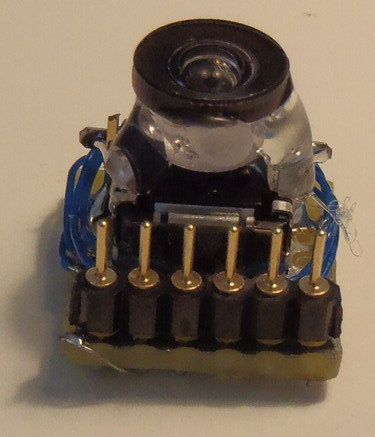
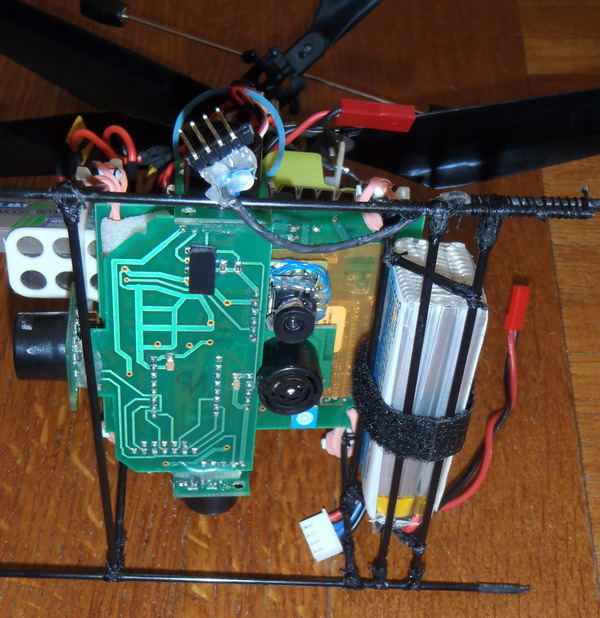
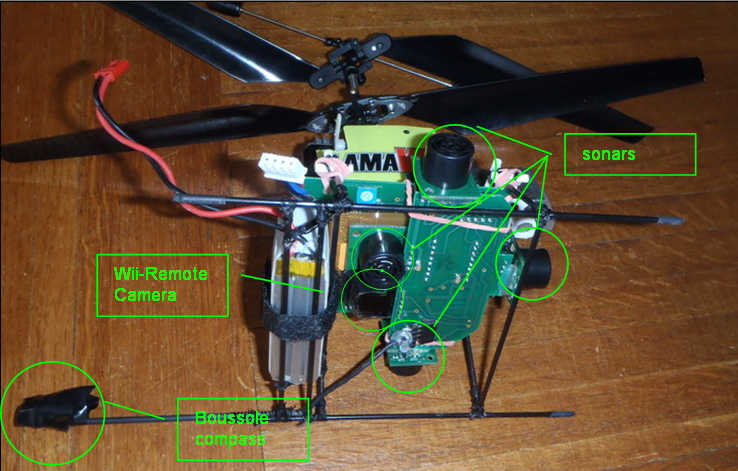
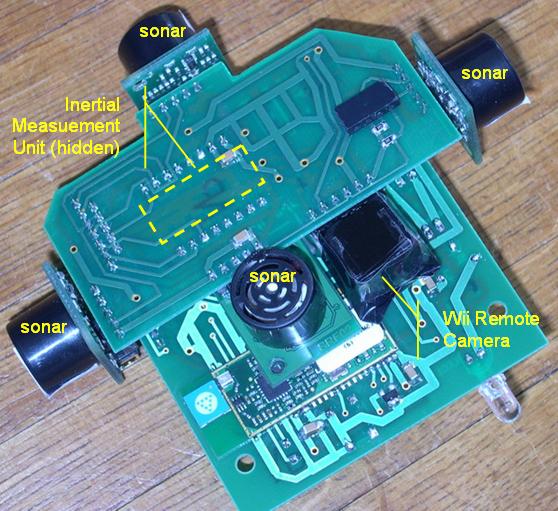
BOB4 - Drone hélicoptere autonome d'intérieurCapteurs
Leon | 28/08/2011
ze.bot_arob_free.fr
|
|||||||||||||||||||||||||||||