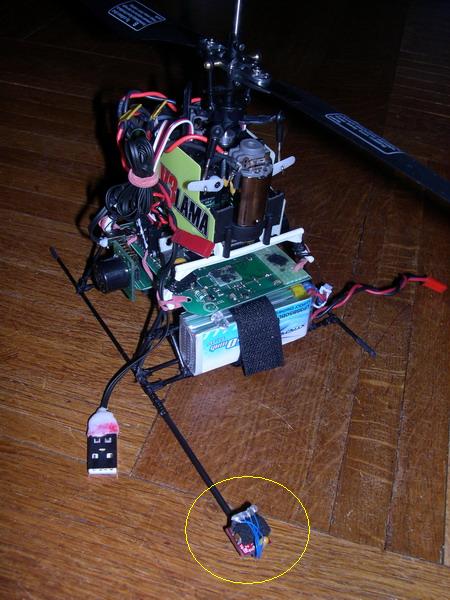
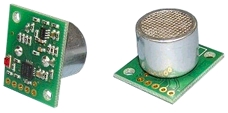
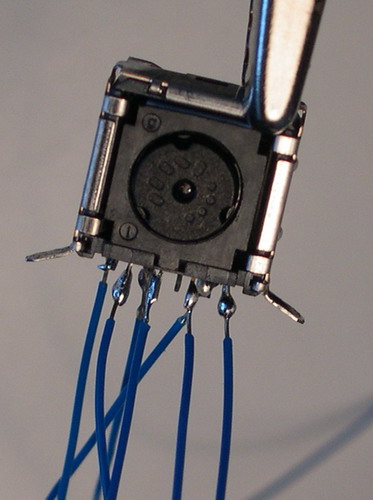
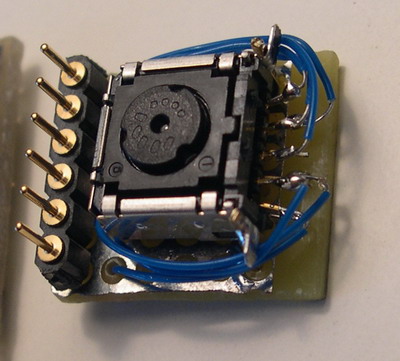
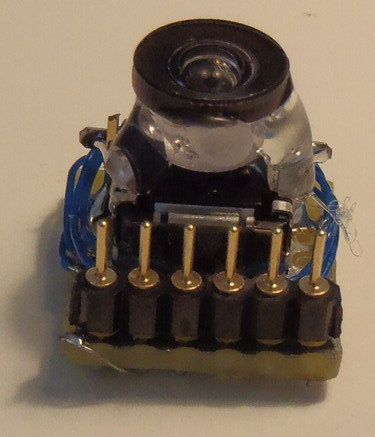
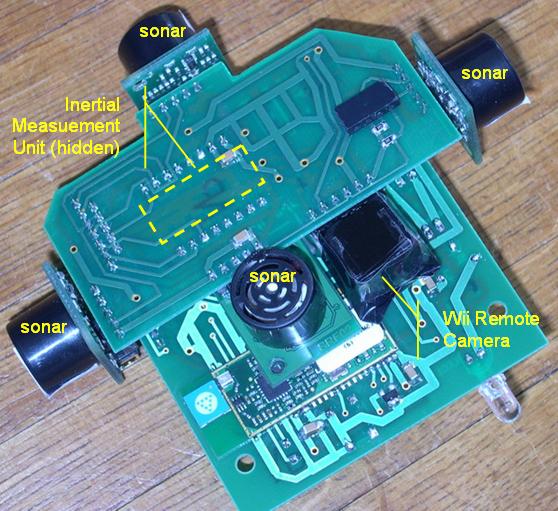
Inertial Measurement Unit :This IMU (Inertial Measurement Unit) is analogic. It delivers 6 analog signals : 3 accelerations, and 3 angular rate (gyro) signals.I chose this IMU because it was at the beginning of the project (dec 2008) the most compact and affordable IMU. The sensors inside are not high quality. The accelerometer are quite bad: the offset error vary a lot with time and temperature. This is quite annoying. I don't use an IMU that gives numeric signals. All computing for IMU is made on the main microcontroller. I think that this is a better architecture than dedicating one microcontroller for IMU and a second for flight control. For good computing inside IMU software part, I can inject variables that come from the flight-control part : throttle order for example. An observer works better if we inject such variables. For example, I can be sure that the UAV is laying flat on the floor, and compensate rapidly offsets of gyro if the throttle order and altitude are low. This is very helpfull. |
 |

Hardware:
Software:
Developpement:
Gallery:
BOB4 - Autonomous indoor helicopter UAVSensors
Leon | 28/08/2011
ze.bot_arob_free.fr
|
|||||||||||||||||||||||||||||