Hardware:
Software:
Developpement:
Gallery:
|
BOB4 - Autonomous indoor helicopter UAV
Helicopter structure
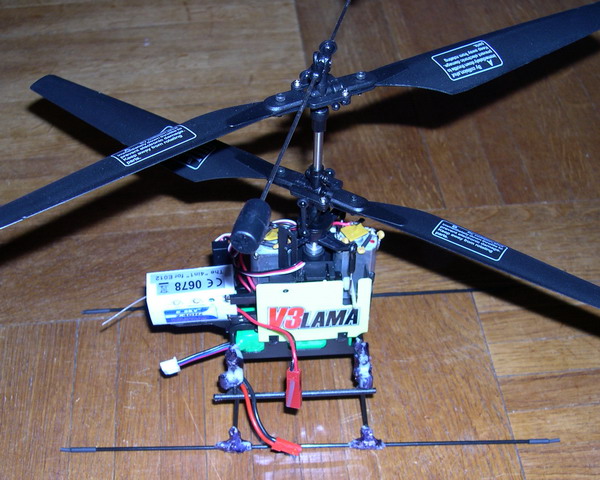
Initial Helicopter :
I chose a bi-rotor co-axial helicopter. This is a whell-known Lama V3 from E-Sky. I removed all useless parts : tail, cockpit...
The co-axial helicopters are the most stable RC-helicopter. This behavior makes control loops even simpler.
The wingspan of a Lama-V3 is small enough for indoor flights. It is much more compact than quadri-rotors. I think that a small size is very important for indoor flights.
|

|
Motors :
I chose "Extrem Motors" that are more powerfull than original ones. The main disadvantage of these motors is that they create an unwanted magnetic field. This magnetic field disturbs the compass.
|
Motor Controller:
This is a "3 in 1" from E-Sky. This is originally designed for the "big lama" helicopter. It is compatible with 2s and 3s li-po batteries.
I chose a separated motor-controller, and not integreted on my custom electronic. My electronics sends "servo signals" to this motor-controller. I chose this because I wanted to have a flexible architecture : if I want to switch to brushless motors, I just have to put new motor controllers.
|
 |
Batteries :
I put a 3s battery, instead of original 2s battery inside the Lama-V3, with the same capacity 800mAh. The motors (xtrem) and the electronics can accept the higher voltage.
The higher voltage gives more power, higher rpm. The UAV has a greater autonomy. Finally, the controll-loop is more robust, because the system is more linear. The throttle command saturates at higher level, higher rpm..
|

|
Blades :
I have tested "Xtrem" blades. These blades give more thrust with the same power, because they have a greater pitch. But they are much more flexible! During strong accelerations, the blades can collapse between the 2 rotors! In this condition, the UAV crashes very rapidly.
Therefore, I chose the original E-Sky blades. I bought plenty of blades, because crashes occur quite often during software development!
|
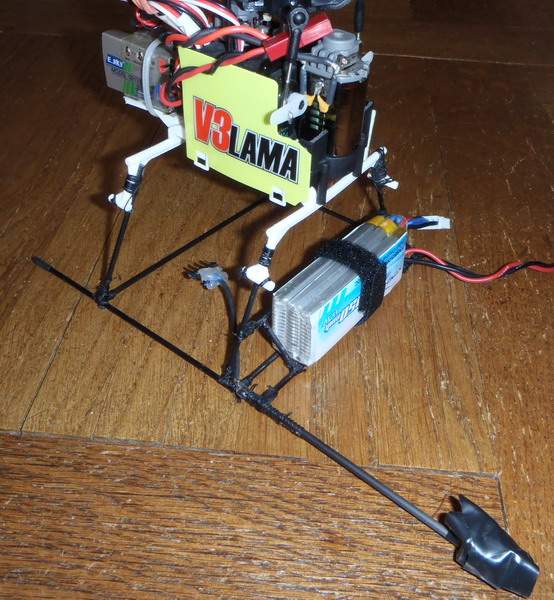
Landing Gear :
The landing gear is made with the original one. I put extensions made with carbon spindles. The spindles are assembled together with ligature technique : sewing thread plus cyanocrylate glue. This is very solid. The landing gear is more solid than the original one.
The landing gear integrates a position for the 3s battery (bigger than original one), and a position for the 2 electronic boards.
|
|
|
|
